
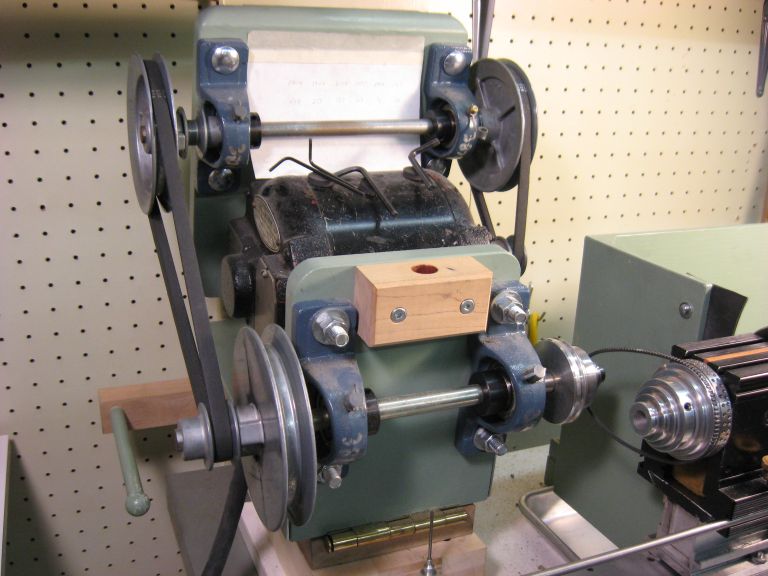
Fig. 5.1: A Low-speed Belt Drive System
During my early machining efforts I was working with various materials and getting my fair share of chatter. All the books I read said the same thing; “when in doubt, reduce the speed”. Even though they were talking mostly about machines like Myfords and South Bends, this just turned my low-speed preoccupation into an obsession. Fig. 5.1 shows the result.
Woodworking had been a lifelong hobby so it was natural to draw on this experience at a time when I was new to machining. The idea was to simulate back gearing with a supplementary group of speeds below the normal range. The pulleys are 1 1/2” and 4 1/2” 4L pulleys available in any hardware store. The actual pitch diameters are 1 1/4” and 4 1/4” respectively so the reduction is theoretically 1:3.4. The motor drives the countershaft at a fixed reduction of ~1780/3.4 or 524rpm. A quick-change belt allows the countershaft to drive the jackshaft at either 524 x 3.4 = 1780rpm or 524/3.4 = 154rpm. The jackshaft then drives the lathe with the standard Taig pulley set. This gives a low range of around 50 to 470rpm without affecting the normal speed range in any way.
This drive had peculiar characteristics. In the low range, modest load caused belt slip at all speeds but seemed to be worse at both ends than in the middle. I could see it at the low end, but the upper? As with the original speed question, I just didn’t understand how this was happening and decided to find out.
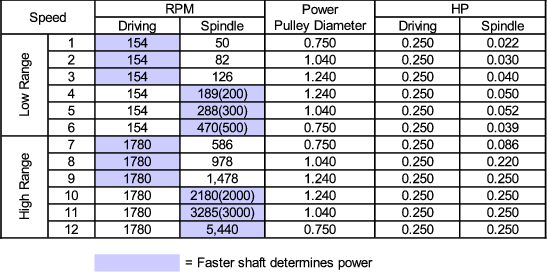
Fig. 5.2: 12-Speed Spindle Power
Fig. 5.2 shows the relative horsepower delivered at each of the twelve speeds. While not directly measurable, these theoretical values are consistent with the effects I observed in the low range. Interestingly, they predict similar behaviour in the high range if the values were not limited by the power of the motor.
None of the values in this paper are absolute but do give an idea of the relative effect that can be expected for a given design change. As you can see, the spindle horsepower is a lot smaller in the low range than in the high range. As a matter of fact, it’s too low. My experience demonstrated conclusively that the low speeds usually solved high speed chatter problems but the work often had to be done very slowly to avoid stalling the spindle.
This drive was so ugly I can’t believe I lived with it as long as I did. But the fact is, it worked Even with the belt slip, the low range was really useful. And I learned quite a bit about belt drives and what to watch out for.